Fun Projects for your LEGO® MINDSTORMS® NXT!
|
|
Fun Projects for your LEGO® MINDSTORMS® NXT! |
| Explorer |
|
![]()
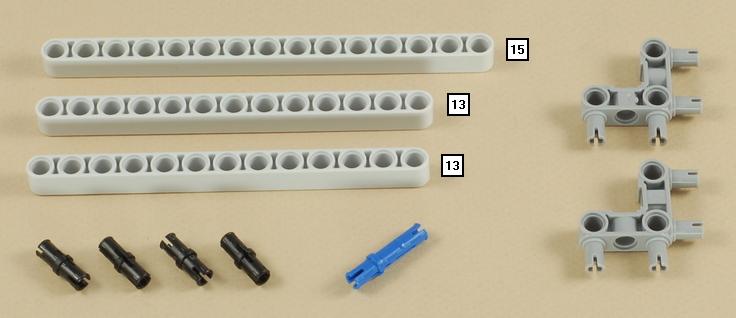
1-14
Start by building the Bumper Car. Click the picture for building instructions.

|
|
15

16

17


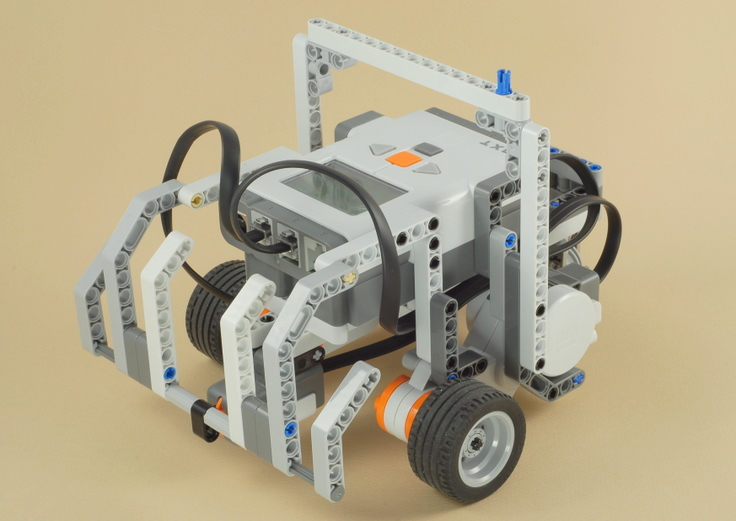
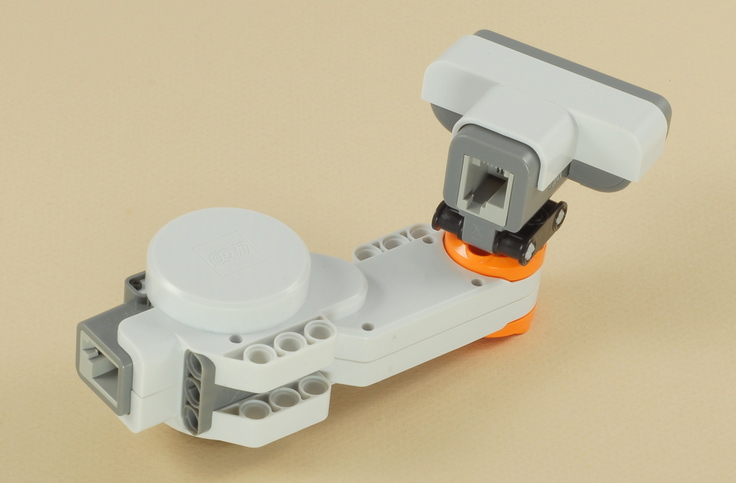
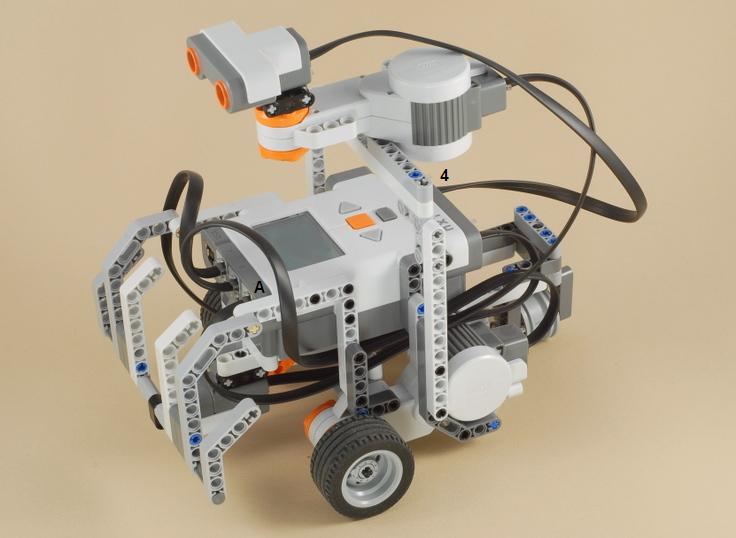
| Connect the neck motor wire to port A on the
NXT, and the ultrasonic sensor wire to port 4 on the NXT. Important: Make sure that the wires stay out of the way of the bumper and that there is enough slack so that the head can pivot all the way to the left and right. |
|
Explorer Programming Use the Explorer program for the Explorer. This program makes the robot repeat the following steps:
|
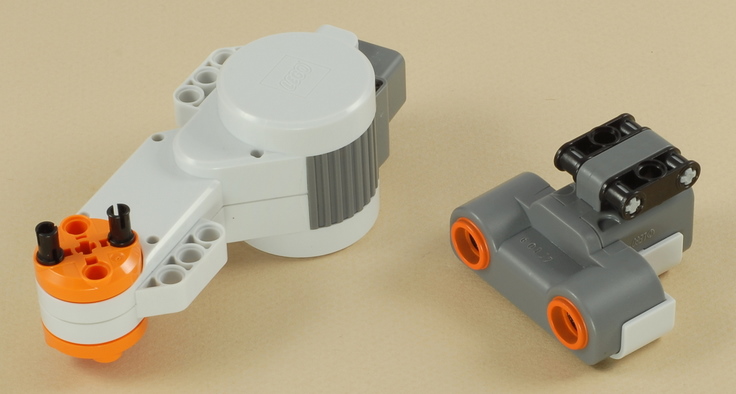
| Make sure the "eyes" of the ultrasonic sensor are pointed straight ahead before running the Explorer program, so that robot is not confused about which way is which. |
Challenges
|
|
|