Fun Projects for your LEGO® MINDSTORMS® NXT!
|
|
Fun Projects for your LEGO® MINDSTORMS® NXT! |
| Mini Golf |
|
![]()
1
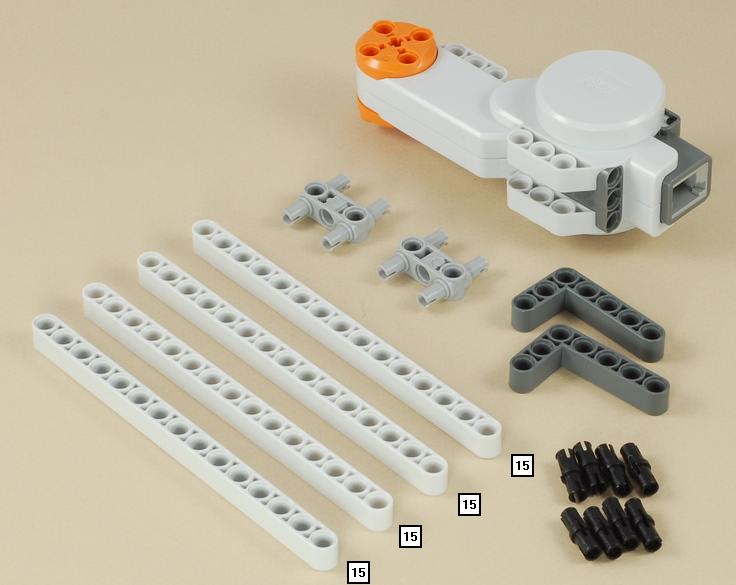

2
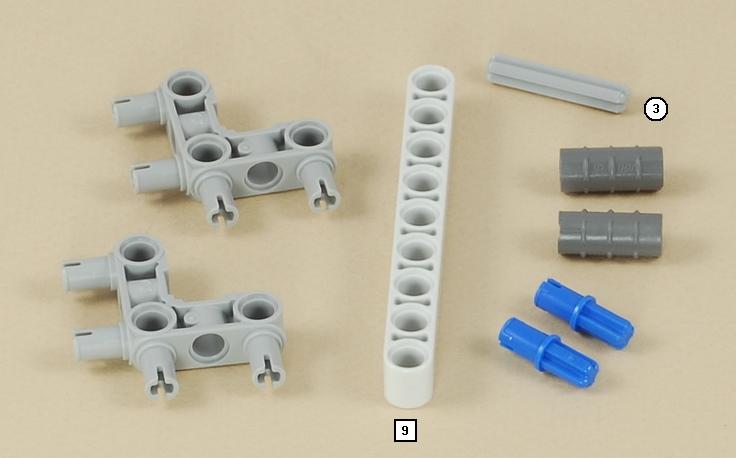
3
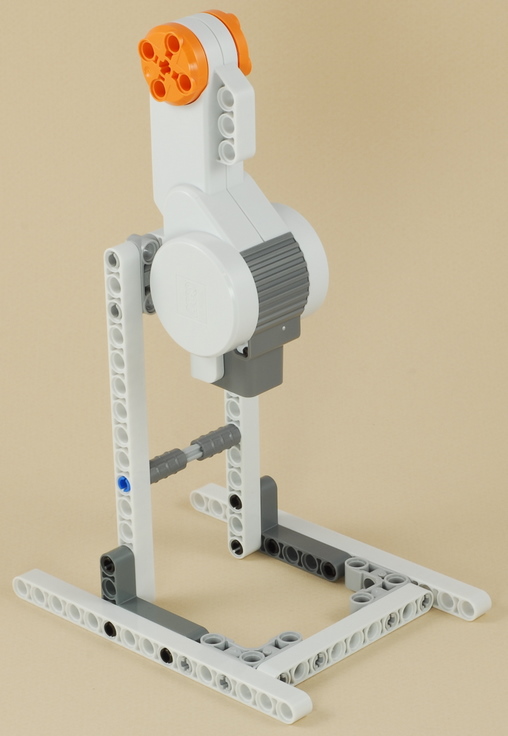
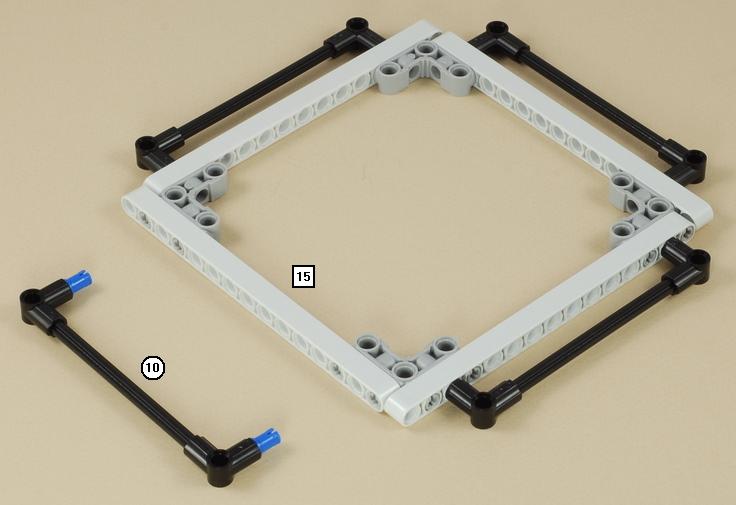
| For playing on carpet (which is recommended,
otherwise the ball will roll too far), four spiked “golf shoes” on the
corners provide grip into the carpet to keep the arm from sliding around
when it swings. |
 4X
4X

4

5
Attach a wire from the motor to port A on the NXT brick.

6
| Design your own “hole” or goal for the ball using
LEGOs or whatever you have. Here is one way to make a "hole" using parts
from your NXT set. |
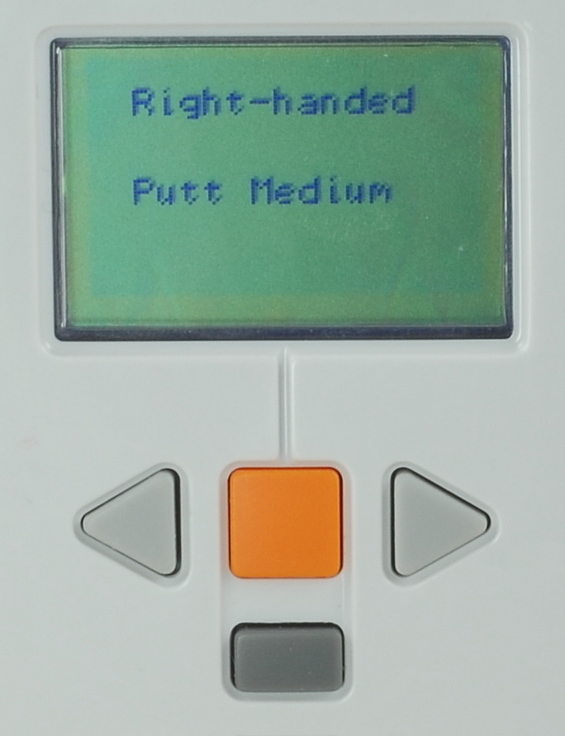
| Mini
Golf Programming Use the program Mini Golf for your Mini Golf game. |
|
 |
|||
|
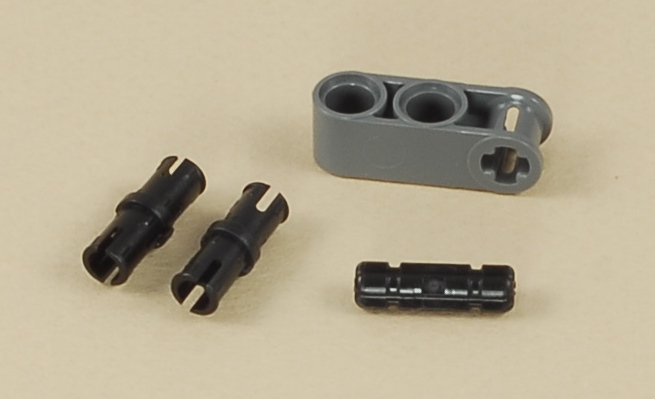
| Building Tip
When taking this project apart, the blue pegs are very
difficult to get out of the axle extenders.
|
Challenges
|
|
|
Copyright
©
2007-2011 by Dave Parker. All rights reserved. |
